 Isaac Asimov, considerado uma espécie de “pai espiritual” dos robôs, traçou para eles os seus três mandamentos, três regras simples que todos os robôs deveriam futuramente seguir:
Isaac Asimov, considerado uma espécie de “pai espiritual” dos robôs, traçou para eles os seus três mandamentos, três regras simples que todos os robôs deveriam futuramente seguir:
1ª: um robô não pode fazer mal a um ser humano e nem, por omissão, permitir que algum mal lhe aconteça.
2ª: um robô deve obedecer às ordens dos seres humanos, exceto quando estas contrariarem a Primeira Lei.
3ª: um robô deve proteger a sua integridade física, desde que, com isto, não contrarie a Primeira e a Segunda leis.
Estas leis, contudo, têm trazido mais problemas para os projetistas de robôs do que para as próprias máquinas, mesmo porque elas somente seguirão as regras se forem programadas para isso pelos seus criadores humanos. E tem sido particularmente difícil para os roboticistas garantir que os robôs obedeçam às duas primeiras: não ferir os humanos e obedecer a eles.
Os robôs são muito eficientes ao trabalhar em ambientes onde não haja humanos. E o desenvolvimento de diversos tipos de sensores tem permitido sua interação de forma cada vez mais amigável. Contudo isto tem adicionado um camada de complexidade tanto para o hardware quanto para o software dos robôs.
E mais complexidade significa maior potencial para falhas - o que afeta diretamente a segurança.
Robôs amigáveis e seguros
Para tentar lidar com o problema, cientistas europeus criaram o projeto Phriends, um termo que une a palavra em inglês para amigos (friends) e a sigla para physical human-robot interactions (pHRI) - interação física entre humanos e robôs.
O objetivo dos pesquisadores é garantir que não ocorram acidentes com humanos mesmo quando acontecerem falhas de programação, mau funcionamento dos sensores ou queima de componentes eletrônicos.
Mudança de paradigma na robótica
Criar um robô que seja completamente seguro, e que ainda seja capaz de fazer alguma tarefa útil, exigiu uma verdadeira mudança de paradigma. “A abordagem clássica em robótica é projetar e construir robôs com uma tarefa específica em mente. Os robôs desenvolvidos pelo projeto Phriends serão intrinsecamente seguros, já que a segurança será garantida pela sua própria estrutura física e não por sensores externos ou algoritmos que podem falhar,” explica o coordenador do projeto, Antonio Bicchi.
Embora se refira aos robôs desenvolvidos pelo projeto, ainda não existe um robô pronto que atenda a todas as especificações. Os cientistas estão adotando o que eles chamam de enfoque “um membro de cada vez.” E o primeiro membro a ser desenvolvido é um braço robótico, provavelmente o mais importante de todos, com possibilidades de utilização imediata entre os robôs industriais.
Atuador de Rigidez Variável
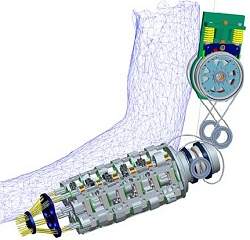 O braço robótico adota um conceito batizado de Atuador de Rigidez Variável (VSA, na sigla em inglês). Da mesma forma que os músculos dos humanos e dos animais movem-se em direções opostas para controlar os membros, o VSA tem um controle simultâneo do braço robótico.
O braço robótico adota um conceito batizado de Atuador de Rigidez Variável (VSA, na sigla em inglês). Da mesma forma que os músculos dos humanos e dos animais movem-se em direções opostas para controlar os membros, o VSA tem um controle simultâneo do braço robótico.
Para isso, ele utiliza dois motores operando de forma antagônica para manipular uma mola não-linear. Esta mola age como uma transmissão elástica entre cada um dos motores e a parte móvel do próprio braço.
“Esse enfoque torna o braço do robô mais leve porque sua estrutura é ‘leve’ quando o robô se move rapidamente e pode colidir com humanos, e se torna ‘dura’, ou tensionada, quando executando tarefas que exigem precisão,” diz Bicchi.
“O desafio real para o futuro da robótica não é fazer algo que seja incrivelmente complexo, mas fazer mesmo as coisas mais simples de uma forma que seja segura, confiável e aceitável pelas pessoas comuns,” diz o pesquisador.
Fonte: Inovação Tecnológica





















Postar um comentário